

从大模子智能的“言语寰球”迈向具身智能的“物理寰球”,仿真确在成为流畅落地的底层基础轨范。
在本次量子位MEET2026智能异日大会上,光轮智能合资独创东说念主兼总裁杨海波给出了他的不雅察:
具身智能的领域广漠于文本与视觉模子,因为数据维度更确切、更复杂。
这也就意味着,具身智能期间的中枢,不是算法自己,而是它所依赖的数据是否有用、可扩展——仿果真惟一梗概惩办数据问题的有筹办。
在仿真计策的路上,会际遇仿真不确切、Sim2Real不成靠等行业痛点,光轮智能正在通过自研的一整套“测量、生成、求解”仿真基础轨范来惩办这些问题,为具身智能提供数据、测验、评测的全历程惩办有筹办。

另外杨海波还进一步指出,仿真不是孤苦孤身一人的时间器具,需要以确切产业需求为锚点,通过应用场景构建生态。
其中,具身仿真金钱制作是生态的泉源流水,依托自动化物理测量与生成时间,产出高物理确切的表率化数据金钱,为具身测验提供中枢燃料;大领域RL测验则通过并行的造谣场景让智能体高效试错学习,将数据价值调遣为具身践诺技巧,同期反向打磨仿真引擎的算力与精度;具身智能仿真评测则以轨范化任务诞生具身行业测验标尺,推动数据与测验体系持续迭代。
三者丝丝入扣、相互赋能,让仿真从时间袭击走向产业赋能,成为相沿具身智能领域化发展的基础轨范。
在此基础上,光轮智能建造了全球最大的遥操数据汇注工场、大领域RL测验平台LW-BenchHub和行业首个工业级机器东说念主评测平台RoboFinals,协同组周密栈仿真平台,为具身智能从实验室走向确切寰球提供关节跳板。
为了好意思满呈现杨海波的想考,在不更正承诺的基础上,量子位对演讲内容进行了整理剪辑,但愿能提供新的视角与细察。
MEET2026智能异日大会是由量子位控制的行业峰会,近30位产业代表与会商量。线下参会不雅众近1500东说念主,线上直播不雅众350万+,获取了主流媒体的庸碌暖热与报说念。
中枢不雅点梳理
光轮智能在业界以仿真合成数据被全球所熟知,而相沿这套数据体系的底层是咱们全栈自研的仿真基础轨范。这套基础轨范亦然异日相沿寰球模子及物理AI落地的关节。
为什么传统仿真的Sim2Real老是失效?主要有三方面:物理不够确切、金钱视觉失真、交互行为不准确。
光轮智能全栈自研了“测量、生成、求解”三位一体仿真惩办有筹办。践诺去自动化物理测量确切寰球,而不再依赖揣测和教育,并在仿真下进行视觉、物理交互、四肢等与确切测量对皆的生成,从而松开Sim2Real gap。
莫得好的生态相沿,仿真平台无法持续发展。真刚巧的仿真平台从来都不是孤立的,而是需要生态构建,需要海量的使用场景来考据和优化,也需要持续的交易答复来加强时间参加。
光轮智能从一驱动就聚焦于打造仿真领域的“爆品应用”,包括仿真遥操数采、大规效法真强化学习测验平台LW-BenchHub、为具身前沿模子打造的行业评测轨范RoboFinals。
以下为杨海波演讲全文:
具身智能与寰球模子的“数据契机”比大模子及智驾大千倍
和全球共享一下咱们在作念的事情。
光轮智能被全球熟知更多的是仿真合成数据,今天共享的是接济这套数据体系的底层系统,自研的仿真基础轨范。
咱们在这套基础上作念了许多开发和演进,咱们认为这亦然接济寰球模子包括物理AI落地的关节。
简便先容一下公司,咱们底层依托仿真股东AI进入物理寰球,公司居品包括处事具身和寰球模子的仿真合成数据,包括评测和Sim2Real的部署。
2023年树立,交易化推崇相比快,咱们简直处事了整个具身和寰球模子的头部客户,包括了英伟达、DeepMind、Figure AI等好意思国的一些具身和寰球模子,包括国内字节、阿里,还包括一些场景方,包括TOYOTA、祯祥,利用咱们的数据,咱们把践诺真确的Sim2Real落地到工场当中。
咱们和学术界也有很好的联接,上个月自研的仿真责任流成为Hugging Face官方指定的仿真环境。
咱们认为,具身寰球模子的数据契机将会是大言语模子的1000倍。
原因在于两个维度,来源智驾是视觉游戏,惟一的物理交互只须车辆和大地的能源学,而具身与之不同,具身需要达成力的反应、逻辑电路和阻尼等多维度,数据也愈加复杂,比如说,当我进入家中、拉开雪柜的门,需要达成有劲的反应,这样就多了一个维度,数据也愈加复杂。
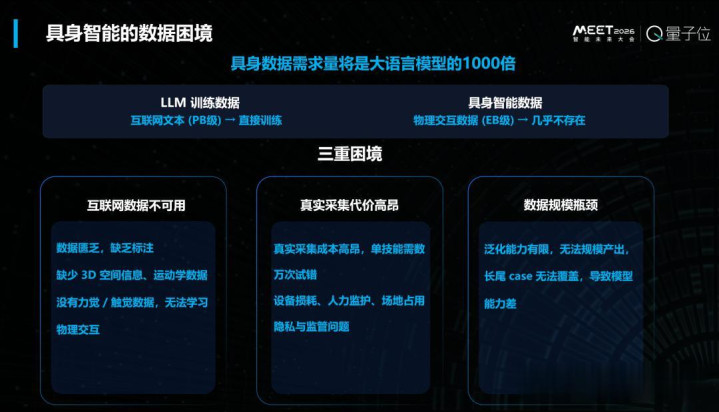
另一方面,从预测验数据角度来说具身有许多契机,大言语模子包括智驾在内,其实预测验数据都是现有的,大言语模子销耗几十年来互联网上千里淀的数据,自动驾驶也需要不停地传回数据。
咫尺全球作念的预测验更多的是对数据的汇注、处理、加工、标注、筛选等,但具身是莫得践诺在跑的,这里有巨大的预测验需求。
真机数据还面对着老本不菲、易坏、东说念主力孤寒等问题,终点是它的场景相比单一,我曾经屡次提过,它存在Real2Real的差距,比如咱们自主搭建的“确切厨房”场景,和现实寰球的厨房在细节和形态上仍有很大差距。现实里无数长尾情况在搭建场景中每每缺失,这些差距很难补皆。
要惩办这一切,咱们认为依靠仿果真一个有用的方针。
至于为什么往日的仿真会失效呢?我认为主若是三个方面。
第一个是物理不够确切,物理的表面模子包括参数,都靠揣测或者教育,力的统统也不准确,视觉莫得作念到填塞确切,比如材质、纹理、光照,要不终点邃密酿成工程化难度,要不无法接济视觉的需求。
另外一个则是交互不准确,举个例子,当咱们进入房间绽开灯的同期,既要听到声息有响动又要看到灯光亮起来。再比如开雪柜门,四肢也不是“物理上把门推开”这样简便,而是要克服门边磁吸的吸附力才调绽开——这种交互相关如果没建对,仿真就会偏差很大。
这样下来,就导致仿真和确切寰球之间存在巨大的各异,从而影响确切环境的部署,班师率也从表面上的100%降至5%。
那么如何惩办这个问题呢?
光轮智能自研“测量、生成、求解”三位一体的仿真平台
咱们自研了一套“测量、生成、求解”三位一体惩办有筹办,建造了一座“虚实对标物理测量工场”,而不再依赖揣测和教育。
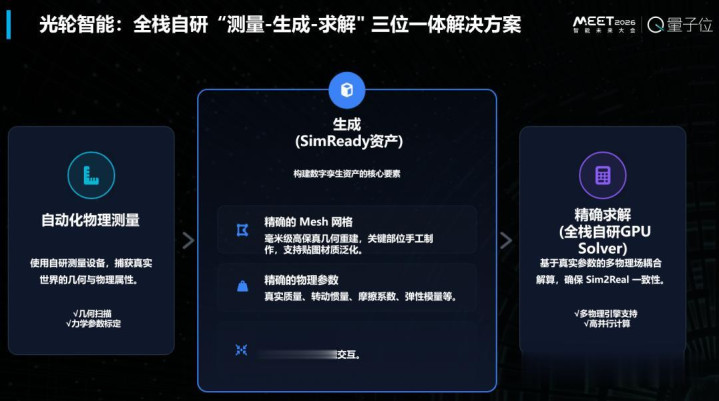
咱们自研的中枢是一整套生成系统,包括金钱、场景、力的对皆,当中需要和确切寰球100%对皆,举例力的反应、力的大小等,认知用的是全自研GPU的Solver,它确保生成班师后, Sim2Real梗概填塞确切。
前边提到传统仿真依赖揣测和教育,咱们自研测量开发,达成自动化物理测量,确切对标物理寰球打造仿真工场。
测量之后则是生成,当中最关节的是金钱和场景,需要同期爽直视觉确切和物理确切,并笼罩钢体、搭钮、流体、可形变物体等,其中流体会像蛋糕奶油或水相同慢慢流下来,可形变物体如线缆,笼罩了工业、居家等各式场景。
咱们在全球范围内界说了这部分的行业轨范,主流的厂商都在follow咱们的表率,这个表率叫LW-Ready,不仅是物理上的Ready,也包括处事遥操的Ready,和RL的Ready。
往日这方面很错杂,全球在仿真顶用X代表横如故Y代表横都不一致,咫尺光轮协调解表率了商场。
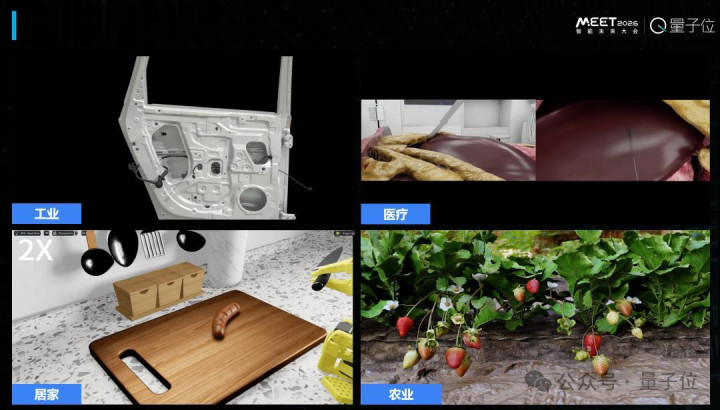
以下是咱们仿真的几个案例:
第一个是工业的门,第二个是医疗场景下的脏器,其脆度、柔度要合适确切寰球,第三个是腊肠,不仅不错视觉看到,还不错从不同的角度切开它,何况这个力也对应确切寰球的漫步。
临了一个是草莓,这是处事于咱们的农业客户,仿真下不错用相应的力把草莓摘下来,力大了就拽断,力小了就拽不下来,统统对皆确切寰球的表率。
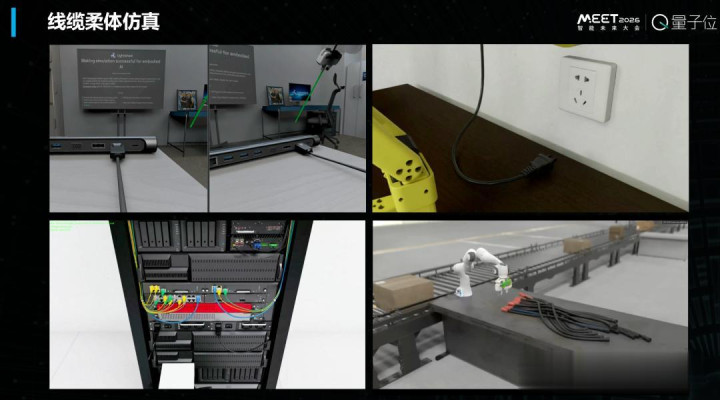
这是线缆,线缆是一个圣杯级的艰难,不错看到曲度变化插拔接口的服从,不同力度都能达成准确的仿真,这帮咱们赢得许多工业级客户,刚才说起的进入场景的客户,许多也都看到了咱们在线缆上的一个遑急袭击。
这是厨房场景,跟着卷帘拉动,卷帘会跟着确切变化动掸,同期不仅卷帘自己变化,窗外光影也会跟着卷帘变化而变化,合适确切寰球光影。

先容完仿真场景之后,咱们先容高保真的力学仿真,因为要具备合适确切寰球的金钱和场景,就需要在仿真下达成准确的力学生成。
咱们的金钱场景是彩色电影,其他仿真器是短长电视机,无法达成咱们的金钱场景,因此咱们在力学上作念了许多责任,确保达成金钱的服从。
通过力学参数瞎想保证磁吸、阻尼、开门等责任,同期保证力学标的属性的对标。利用不同参数的调试,让门对应不同的力完成开合。
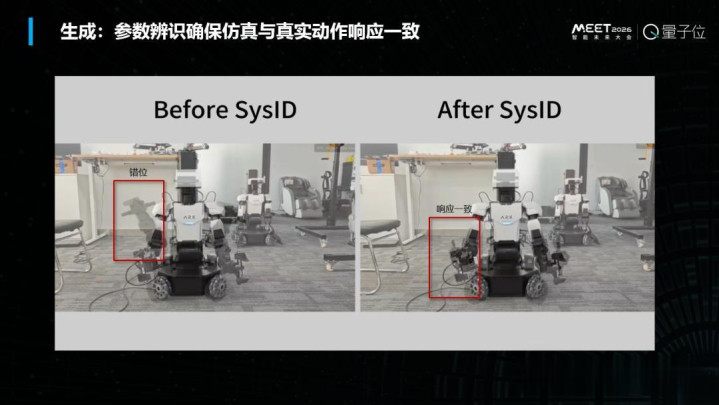
生成仿真场景之后,需要在场景内构建准确的机器东说念主基础模子,才调真确在仿真寰球中汇注数据、测验。而想要构建准确的机器东说念主基础模子,参数辨识必不成少。
参数辨识,即是指有了金钱场景和力的生成后,仿真的机器东说念主跟物理寰球的机器东说念主对皆包括戒指器参数、钢度、阻尼、物理属性、摩擦模子、质料漫步,还包括扩展器特征、速率、力矩,以实时序对皆、戒指频率、系统延时等等,都要和确切寰球进行对皆。
只须这些参数辨识准确了,仿真机器东说念主和确切机器东说念主在接到相易的戒指信号之后才调产生一致的行为和四肢,包括轨迹、时序和能源等,弥合Sim2Real Gap,确保在仿真中测验的计策能可靠地移动到确切硬件上,减少部署失败率。
这里Demo左边是莫得对皆的情况,暗影是仿真服从,右边是对皆的。
自研仿真的临了一步是求解,这是仿真的腹黑,需要专揽深度的谋划物理、数值分析、刚体能源学、战役力学、管理求解等多个领域的常识,还需要千万级摆脱度实时求解,确保数值褂讪性和谋划服从的均衡,每个轨范都充满挑战。
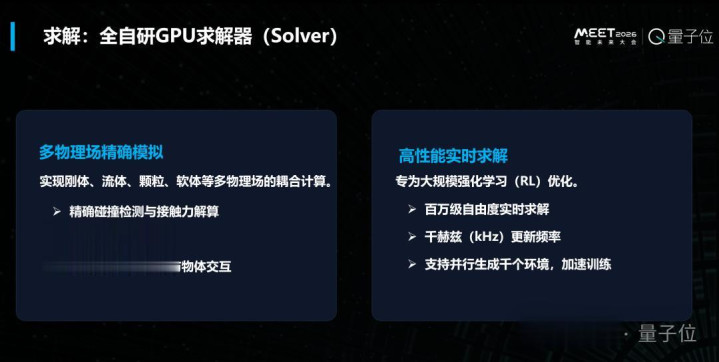
咱们的Solver是全栈自研的GPU Solver,不错接济百万级摆脱度的求解,达成刚体、流体、球体多物理场的耦合,物理精度达到亚毫米级,更新频率达到千赫兹。
咱们这套引擎还能接济对机器东说念主任务进行优化,在战役力谋划、握取模子、行走褂讪性等关节轨范都有专有的算法翻新,确保不错处事到具身的需求。
生态相沿和交易化加快落地,RoboFinals成为率先的模子评测轨范,持续推动仿真平台发展壮大
在攻克许多时间艰难后,咱们明晰禁闭到莫得好的生态相沿,仿真平台就无法持续发展,就像安卓生态的发展离不开微信、好意思团、滴滴这些APP。
仿真平台之间不是孤立的,需要进行生态构建,需要海量的使用场景考据优化,也需要持续的交易答复加强时间参加。
往日许多企业没能作念好仿真,其中一个原因即是莫得找到爆款应用相沿持续演进,咱们从Day 1就驱动瞎想这种生态上的爆款应用,第一个是仿真遥操数据,第二个是大领域的RL测验,第三个即是具身的仿真评测。
第一个应用是咱们全球最大的仿真遥操汇注工场,同期咱们在东南亚也有基地,咱们自研的这套框架和硬件,包含不同汇注花样,包括6D鼠标、AR、VR等,专揽自动化质检、标注以确保数据的质料。
关于这样一套处事国表里最顶级客户的产线,不论是寰球模子公司如故具身公司,全球最看重和暖热的如故物理交互确切寰球的底层瞎想。
第二个应用是大领域RL系统平台LW-BenchHub,不错在高仿真环境中开展大领域RL测验,同期运行成千上万的并行仿确切例。
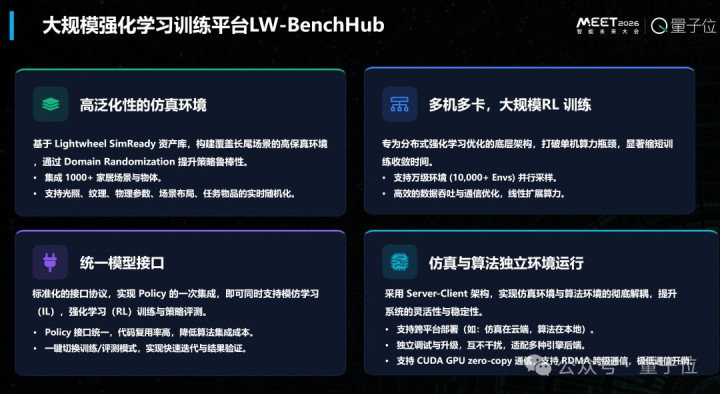
每个实例都会尝试不同的握取计策和力控参数,造谣轨范中的零件也不错无尽复制,即使出现碰撞,也不会酿成任何蚀本,机器东说念主还能24小时赓续绝责任,这都是真机环境中无法达成的,
测验平台上还不错自动生成顶点、长尾的场景,包括位置偏差、名义污渍、隐微形变,都不错增强机器东说念主的鲁棒性。
第三个是咱们刚刚发布的RoboFinals。
现阶段全球顶尖的AI Lab都在面对相易的逆境:模子曾经向上整个学术基准,无法真确评估它们的确切才略,预计时间与前沿水平的差距。
而这套RoboFinals波及一百项工业级任务,涵盖家居、工场、零卖等确切场景,接济跨机器东说念主、跨仿真器的协调评测,为行业提供轨范化度量器具。
咫尺RoboFinals评测平台曾经成为全球使用频次最高的仿真应用之一,这亦然业内首个针对前沿机器东说念主模子的工业级平台,格传闻神,其中各项场景任务都是基于确切需求完成的瞎想,还有无数的泛化过程确保场景填塞种种。
以上即是公司全栈仿真平台先容,咱们但愿自研的这套仿真平台不错把复杂的物理寰球综合成不错使用的责任才略,本质上是构建一个数字平行的天地,让更多团队不错元气心灵集合在践诺或者任务瞎想上。
而作念好仿真,一直都是实验室责任调遣为行业基础轨范的必经过程。
异日咱们但愿和高下流伙伴,包括算力、寰球模子公司、具身公司以及五行八作应用方协同,把自研的仿真底座打磨得更稳、更准和更易用,用塌实的才略接济具身产业的永久发展,驱动机器东说念主迈向通用的东说念主工智能期间,谢谢全球!
— 完 —
量子位 QbitAI · 头条号
暖热咱们,第一时刻获知前沿科技动态